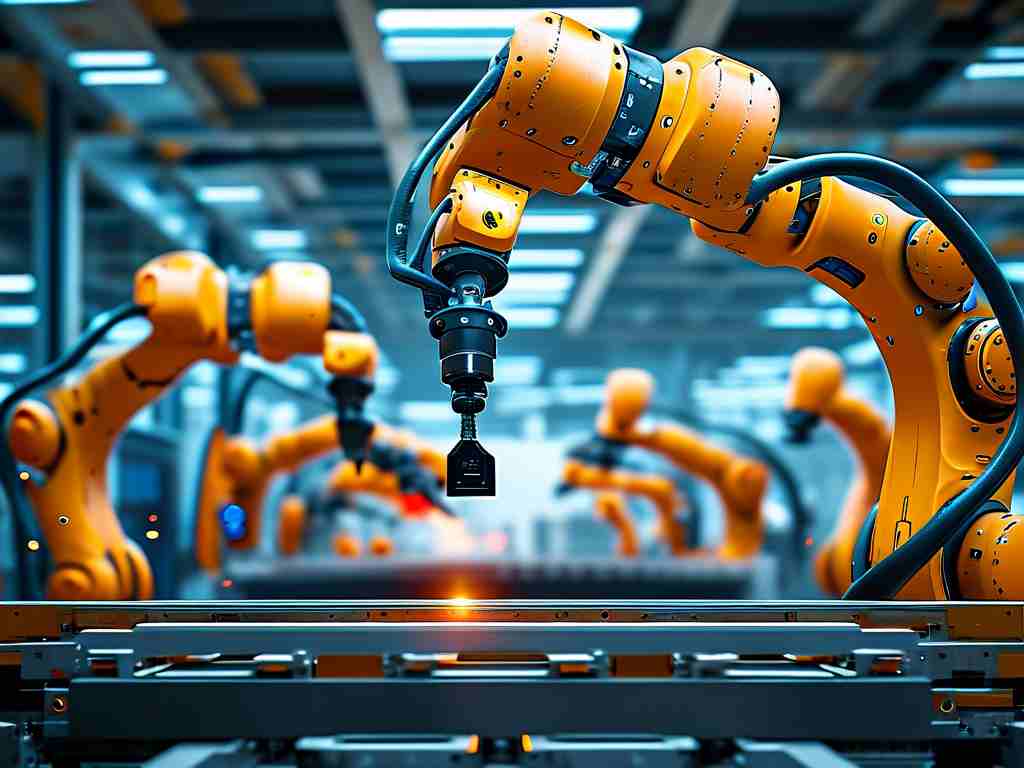
Collaborative robotics represents a transformative shift in automation where robots work alongside humans seamlessly enhancing productivity and safety across industries like manufacturing healthcare and logistics. This technology relies on core principles that ensure efficient human-robot interaction without compromising security or performance. At its heart collaborative robotics operates through advanced sensory systems enabling real-time environmental awareness. For instance force and torque sensors detect minute pressure changes allowing robots to halt instantly if unintended contact occurs preventing injuries. These sensors integrate with vision systems such as cameras and lidar to map surroundings accurately adapting movements dynamically to avoid obstacles. This sensory fusion forms the foundation of safe collaboration as robots continuously monitor proximity to human operators adjusting speed and force according to predefined safety thresholds often governed by ISO standards like ISO 10218 and ISO/TS 15066 ensuring compliance in industrial settings.

Another critical principle involves communication protocols that facilitate seamless data exchange between multiple robots and human interfaces. Using wireless technologies like Wi-Fi Bluetooth or dedicated industrial networks such as EtherCAT robots share status updates task assignments and error signals in milliseconds. This interoperability allows for coordinated actions such as in assembly lines where one robot handles part positioning while another performs welding all synchronized through middleware like ROS (Robot Operating System). ROS provides open-source frameworks for developing applications where robots can learn from each other optimizing workflows without human intervention. For example code snippets like rosrun collaborative_node enable real-time command execution fostering adaptability in unpredictable environments. Such communication ensures that collaborative systems scale efficiently from small workshops to large factories reducing downtime and errors.
Underpinning these operations is the principle of intuitive programming and AI-driven decision-making. Unlike traditional robots requiring complex coding cobots often use teach pendants or drag-and-drop interfaces allowing workers to program tasks quickly without specialized skills. Machine learning algorithms analyze historical data to predict failures or optimize paths enhancing efficiency over time. For instance AI models trained on sensor inputs can identify patterns in human movements preemptively adjusting robot trajectories to maintain harmony. This adaptive intelligence reduces the need for constant reprogramming making collaborative robotics accessible and cost-effective. Additionally ethical considerations like data privacy are embedded into design principles with encryption protocols securing sensitive information during operations.
The benefits of these principles extend beyond safety to significant economic and operational gains. In automotive manufacturing collaborative robots reduce production cycle times by 30% while minimizing waste through precise handling. Healthcare applications see robots assisting surgeons with steady instrument control improving patient outcomes. Despite challenges like high initial costs or integration complexities the future promises advancements in swarm robotics where multiple autonomous units collaborate on large-scale projects. As this technology evolves it will democratize automation empowering small businesses and driving innovation across sectors. Ultimately collaborative robotics exemplifies a harmonious fusion of human ingenuity and machine precision reshaping industries for a smarter safer world.