The evolution of manufacturing has reached a pivotal stage with robotic drilling systems emerging as a cornerstone of industrial automation. Unlike traditional manual or semi-automated methods, these systems integrate advanced mechanics, real-time data processing, and adaptive control algorithms to achieve unmatched accuracy. This article explores the technical foundations of robotic drilling, its operational workflows, and the transformative impact it brings to industries ranging from aerospace to automotive production.
Foundations of Robotic Drilling
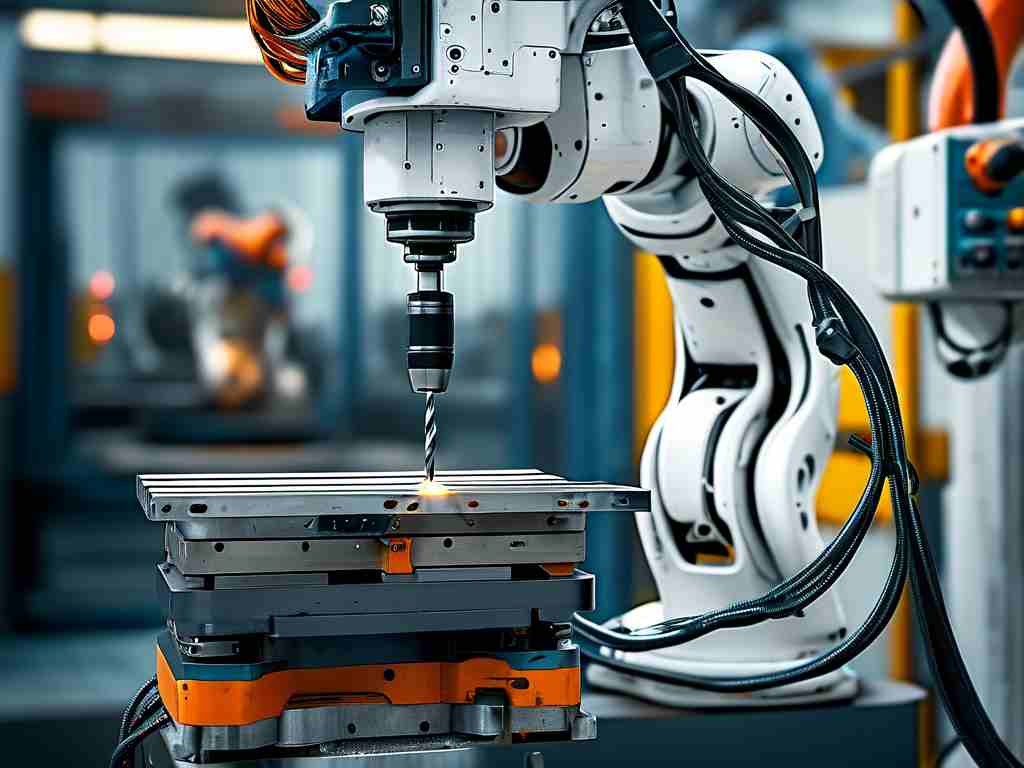
At its core, robotic drilling relies on three interconnected components: kinematic positioning, force feedback systems, and dynamic path correction. The robotic arm, typically a six-axis articulated unit, uses servo motors and harmonic drives to position the drill bit within micrometer-level tolerances. This precision is further enhanced by force-torque sensors embedded in the end effector, which monitor resistance during drilling. If unexpected material hardness or geometric deviations are detected, the system instantly recalculates spindle speed and feed rate through closed-loop control algorithms.
Synchronization with Digital Models
Modern systems synchronize with CAD/CAM data to execute pre-programmed drilling patterns. A notable innovation is the integration of laser scanning for real-time surface mapping. Before initiating the drilling sequence, the robot scans the workpiece to compare its physical geometry against the digital blueprint. Discrepancies as small as 0.1 mm trigger automatic adjustments to drilling coordinates, eliminating errors caused by material warping or fixture misalignment. This self-correcting capability is particularly critical in aircraft assembly, where thousands of holes must align perfectly with underlying structural components.
Adaptive Tool Management
Tool wear compensation represents another layer of sophistication. Embedded vibration sensors analyze frequency patterns during drilling to detect dull bits or chipping. When anomalies are identified, the robot either adjusts downward pressure to prolong tool life or switches to a backup drill via an automated tool changer. Some systems even employ machine learning to predict wear trends based on historical data, scheduling maintenance before defects occur.
Industry-Specific Implementations
In automotive manufacturing, robotic drilling cells achieve cycle times of under 15 seconds per hole while maintaining ±0.05 mm repeatability. For composite materials used in wind turbine blades, robots employ peck drilling cycles with vacuum extraction to prevent delamination. The aerospace sector has adopted on-machine probing, where the drill bit itself acts as a measurement device to verify hole depth between cycles—a process that reduces inspection time by 40%.
Challenges and Future Directions
Despite these advancements, challenges persist. High-frequency vibrations in hard metals can destabilize robotic arms, requiring hybrid solutions that combine industrial robots with rigid CNC platforms. Researchers are experimenting with ultrasonic-assisted drilling and AI-driven chatter suppression to address this limitation. The next frontier involves decentralized systems where multiple drilling robots collaborate through 5G-enabled edge computing, dynamically redistributing tasks based on real-time production analytics.
As industries demand higher precision and flexibility, robotic drilling technology continues to redefine manufacturing paradigms. Its ability to merge mechanical accuracy with intelligent adaptation ensures its role as a critical enabler of Industry 4.0 initiatives worldwide.