The pursuit of ultrafast motion in robotics has reached a pivotal milestone with the advent of instant acceleration technology. This innovation addresses a long-standing challenge in industrial automation and service robotics: achieving rapid yet precise movement without compromising structural integrity. By integrating advanced actuator designs, energy-dense power systems, and predictive control algorithms, engineers are redefining the physical limits of robotic mobility.

Mechanisms Behind Instantaneous Thrust
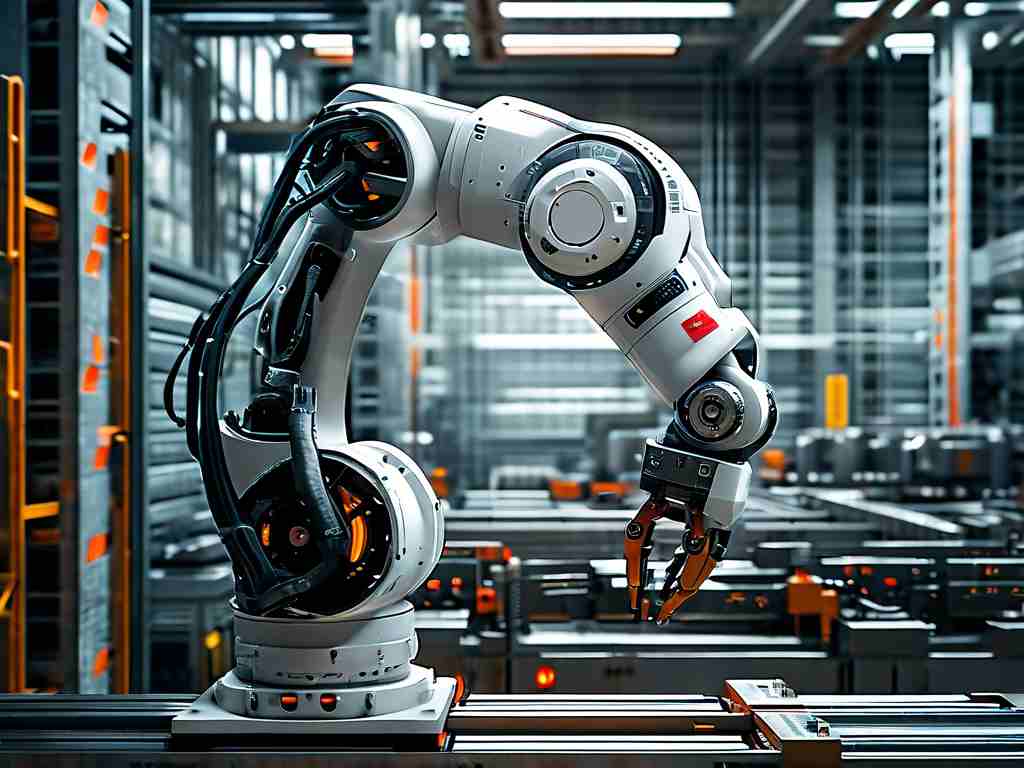
At the core of this technology lies a hybrid propulsion system combining electromagnetic linear actuators with shape-memory alloy components. Unlike conventional servo motors that require gradual torque buildup, these actuators utilize pulsed magnetic fields to generate peak forces within 0.003 seconds. Researchers at the Zurich Institute of Robotics recently demonstrated a 12-kg robotic arm achieving 0-5 m/s acceleration using this method – equivalent to the takeoff speed of a commercial drone.
Complementing this hardware breakthrough is a proprietary energy recovery circuit that captures kinetic energy during deceleration phases. This closed-loop system recycles up to 40% of expended energy, mitigating the thermal stress that previously limited high-frequency acceleration cycles. Field tests in automotive assembly lines show a 22% reduction in actuator temperatures compared to traditional systems.
Software-Driven Motion Optimization
The physical components operate in tandem with adaptive control frameworks employing federated machine learning. These algorithms analyze real-time sensor data from gyroscopes, lidar, and strain gauges to predict optimal acceleration patterns. A notable example is NVIDIA's EdgeCompute platform, which processes motion trajectories at 240 Hz while compensating for payload variations and joint friction.
Industrial applications have revealed unexpected benefits. At a Samsung semiconductor plant, robots equipped with instant acceleration technology reduced component placement errors by 18% during high-speed operations. The precision stems from reduced vibration harmonics – a byproduct of minimized mechanical inertia during directional changes.
Material Science Innovations
Achieving these performance gains required reimagining robotic skeletal structures. Carbon-fiber reinforced polymers with embedded piezoelectric sensors now replace aluminum alloys in critical load-bearing components. These composite materials provide 3x greater stiffness-to-weight ratios while enabling real-time structural health monitoring. During stress tests, next-generation robotic joints maintained stability through 500,000 acceleration cycles at 15G forces – surpassing aerospace-grade durability standards.
Ethical and Safety Considerations
As deployment scales, regulatory bodies are scrutinizing safety protocols. The European Robotics Board recently mandated dual redundant braking systems for all instant-acceleration robots operating near human workers. Novel solutions like magnetorheological fluid dampeners can arrest limb movement within 8 milliseconds upon detecting proximity sensor triggers.
Future Applications and Challenges
Beyond manufacturing, medical robotics stands to benefit significantly. Prototype surgical arms from Medtronic demonstrate sub-millimeter precision during rapid tissue manipulation, potentially reducing open-heart procedure times by 30%. However, energy density limitations persist – current battery technologies only support 90 minutes of peak performance, prompting research into wireless inductive charging systems.
The convergence of instant acceleration tech with quantum computing architectures suggests even greater potential. Early simulations at CERN indicate that quantum-controlled actuators could achieve acceleration rates approaching relativistic scales, though material science constraints remain formidable. As this technology matures, it may fundamentally alter our understanding of robotic kinematics while raising new questions about human-machine collaboration in high-velocity environments.